Join our Twitter
Stay tuned and follow updates
Over the past 4 months, the most anticipated and user-friendly projects from the world of DeFi, smart contracts/EVM, and the first mechanisms to ensure user privacy have been integrated into the Kusama ecosystem. Perhaps the time has come for mechanisms to integrate with the real economy by putting IoT devices under Kusama's control... We will find out if this is the case during the third round of auctions.
Below you will find some statistics from the past two Robonomics crowdloan campaigns, updated data on the new crowdloan campaign, a description of the IoT scenarios that Robonomics is ready to launch using the Kusama network, as well as an updated roadmap for the next steps in the project’s development.
During the first round of auctions on Kusama, Robonomics published a crowdloan module for the start of the third auction and a total of 27,000 KSM was collected.
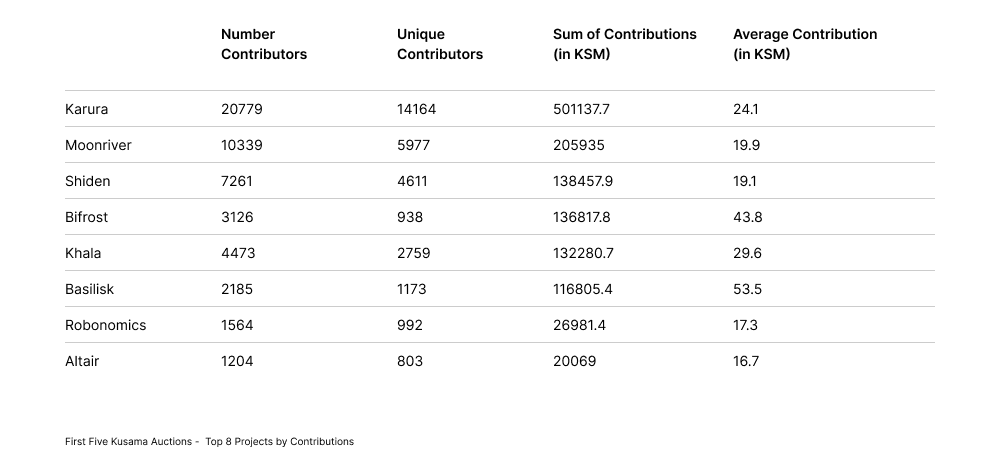 Source: Making History: An Overview of the First Five Parachain Slot Auctions on Kusama
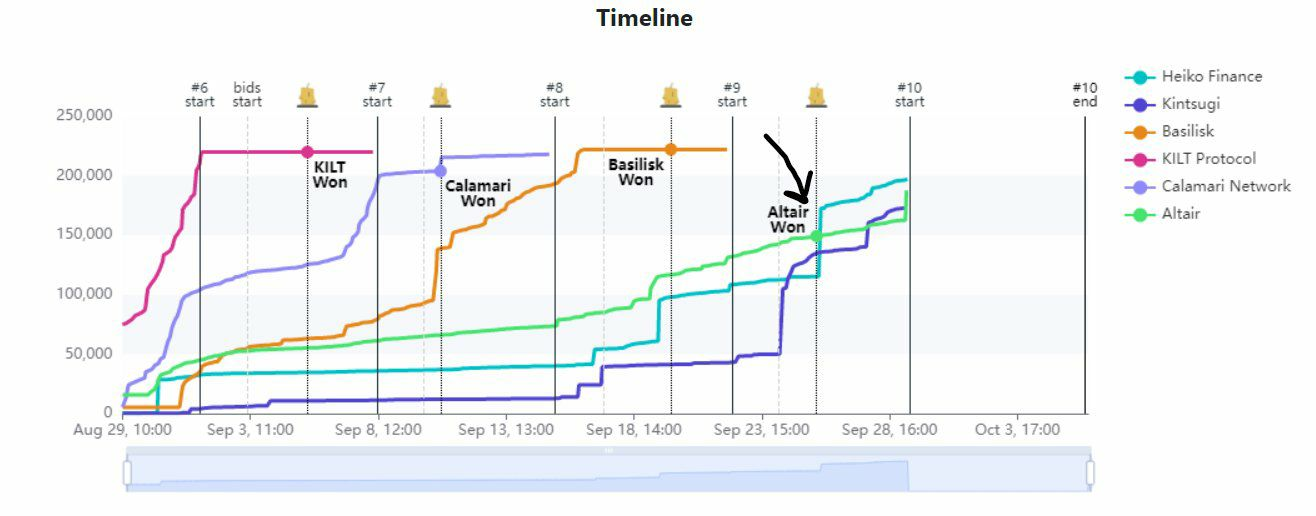
Source: Making History: An Overview of the First Five Parachain Slot Auctions on Kusama
During the second crowdloan campaign, fate conspired against us. The Robonomics developers expected to regain support from at least half of the participants of the first crowdloan campaign, so we were hoping to receive at least 15,000 KSM in the first few days of our crowdloan, this would have helped us make our way into the top five projects of the second round, allowing us to be on the radars of KSM holders who hadn’t yet decided on what project to choose. However, KILT bursting onto the scene with the MOVR token made waves throughout the whole community, giving them an undeniable advantage over the rest of the participants at the start.
At the same time, with KILT receiving the maximum amount of investment from the community, pack leaders emerged from the projects that had collected more than 20,000 KSM tokens on the second day of the second round of auctions. Unfortunately, this led to Robonomics failing to enter the community’s shortlist during the first few days of the second round, and thus did not receive much attention. The battle for slots between Calamari, Basilisk Heiko and Altair saw extremely high stakes and unexpected twists (thanks to the auction mechanism with a candle for the special effects during the Heiko vs. Altair battle).
How much will Robonomics raise in the third round? Will it be comparable to the first campaign, in the region of 20k - 30k KSM tokens? Or more akin to the results of the second round, around 3k to 10k KSM? Only holders of Kusama Relay Chain tokens know the answer. Most importantly, we expect a reduction in fundraising requirements to win one of the next auctions on the Kusama network.
Robonomics developers will publish the KSM crowdloan module on 23 October with the following parameters:
Crowdloan rewards will be distributed in the Robonomics parachain. There won’t be an option to get rewards in ERC-20 XRT.
The main use-case that Robonomics can bring to the Kusama ecosystem are small but fully-fledged scenarios for the application of Polkadot technologies in the real economy.
During Polkadot Decoded 2021 and during the second crowdloan campaign, in an article titled ‘Polkadot for the IoT market…’, I already talked about the services that we created during the experiments of 2017 - 2019 and that we are ready to launch on the Kusama network in the coming months. In this article, I will only briefly describe some of the more complete services again.
For the third year running, the non-profit organisation Airalab Rus has been conducting an experiment to build a decentralised sensor map of air and water pollution in an industrial city on the Volga with a population of 700,000 people (the city of Tolyatti). At the moment, the network of sensors covers almost the entire city, and also measures not only particles, but also more complex chemical compounds such as formaldehyde and ammonia. In 2019, the hardware/software framework for monitoring water was selected for demonstration at the IoT World Congress in Barcelona, and recognised as one of the most unusual and interesting solutions in the field of the Internet of Things. In December 2019, the project was announced as part of the next UN Climate Change Conference, and in 2021 it received additional funding from the European Union to connect sensors certified according to local legislation.
The Civic Sensor Network is an example from the world of Web3, in which technology allows us to overcome the most common problems related to non-commercial activity, such as the inability to give one person super admin rights.
You can learn more about the project on the Airalab Rus: https://airalab.org/en/air-monitoring
Merklebot, which uses Robonomics technologies, has implemented two robot-as-a-service scenarios over the past 12 months, one in the spirit of Industry 4.0 and another in the field of EdTech.
There is an interesting new use case in Robonomics - For four months already, an industrial manipulator has been operating in a manufacturing facility in the United States with an hourly wage. At the end of each shift, the manipulator updates its digital twin instance stored in the parachain. Based on the changes in the digital twin, an invoice is issued for the use of the manipulator structured as IoT-enabled leasing.
Thus, we can say that Kusama will be an example of a fintech solution from Web3 for the new Industry 4.0. Someday the public will understand the significance of this use case, and we will see a boom of DeFi in this modern industry!
This summer, the first group of engineers learned to work with our own Spot as part of the spot-sdk.education course. By the end of September, anyone anywhere in the world can take our course and get their hands on the robodog from Boston Dynamics. The course is developed by robotics specialists from the ITMO University in St. Petersburg with Merklebot acting as the local operator in the San Francisco Bay Area lab, the home of our Spot.
Accessing Spot is organised with the use of two parachains, Robonomics and Statemine. Logs from the students taking the course will be recorded on the Robonomics parachain, while the Statemine parachain is being used to replace user accounts with unique access tokens that students will receive after paying for their course.
This project is related to drone flight regulation: registration of pilots, drones, flight restricted zones and route announcements. The main goal of the proof-of-concept was to demonstrate that blockchain can be used to announce and register flight routes, mitigating the risk of dispatching errors. Such systems can be used as a base for transport and delivery systems for automated vehicles. While implementing decentralised identifiers for pilots and UAVs is not so complex (blockchain is a DID and SSI system by default), storing information about geo-zones and their polygons, and checking intersections in one transaction was a difficult task. As a result, a kind of ‘geo-index’, similar to spatial indexes used in SQL databases, was implemented in runtime logic. The proof-of-concept code allows the REGULATORs to register PILOT accounts, and PILOT accounts to register UAVs and announce UAV routes in blockchain. More info: https://mixbytes.io/blog/mixbytes-robonomics-collaboration-report
Two projects – one is from New Zealand – are using the parachain for recording data about production manufacturing. In one case data about the content of substances in the ground on farms is collected, and data about the final assembly of medical equipment is collected in the second.
Both scenarios would help the Kusama network to prove itself as a registry for global production distributors.
Today, the Robonomics parachain is undergoing a process of further development and testing within an up-to-date copy of Kusama supported by the developers called Frontier Network, which in turn will significantly reduce the time needed to implement these updates after launch on Kusama. Also, all the balances of parachain users in the Frontier Network will be transferred to the Robonomics parachain managed by Kusama as soon as possible.
By mid-September, the developers had implemented updates 1.1 Staking and 1.2 Treasury and Technical Committee. In the coming weeks, Robonomics will be ready for the release of 1.3 RWS, which will allow the launch of a full cycle of XRT tokenomics in the parachain for issuing RWS subscriptions. RWS subscriptions are a unique mechanism based on the ability of developers to build their own communication protocol in a shared security environment. RWS will introduce blockchain technology to the IoT market using a familiar subscription model for users, guaranteeing priority processing of transactions in each block. This will protect IoT devices that need to update the state of their digital counterparts to display information in the users’ application regularly and predictably over time. An article titled ‘Update 1.3 RWS’ will be published at the end of October.
Thus, the updated roadmap for the development of the Robonomics parachain for the period of slot leasing will look like this:
Three months after the launch of the Robonomics parachain, Robonomics developers are going to activate the core functionality that’s been in development in the past couple of years, and also supplement the network with modules that have proven themselves in the Polkadot and Kusama ecosystems.
The second part of the roadmap is designated to the launch of services based on previous Robonomics R&D projects.
The final task for 48 weeks of existence on the Kusama network is the transformation of the Robonomics parachain into the Robonomics Relay Chain. This is our vision for the future of Robonomics, as a complete segment of the Polkadot infrastructure specifically intended for working with IoT devices.
Kusama is an experimental network, and the main reason it is worth participating in any activity surrounding this network is the desire to be involved in a large experiment. When deciding whether you will help Robonomics during the second crowdloan campaign or not, the only question you should be asking yourself is: do I want to see the functionality of putting IoT devices from the real world under the control of the Kusama network in the near future? If the answer is yes, then you are as crazy as we are. You want to change the world, so welcome on board!