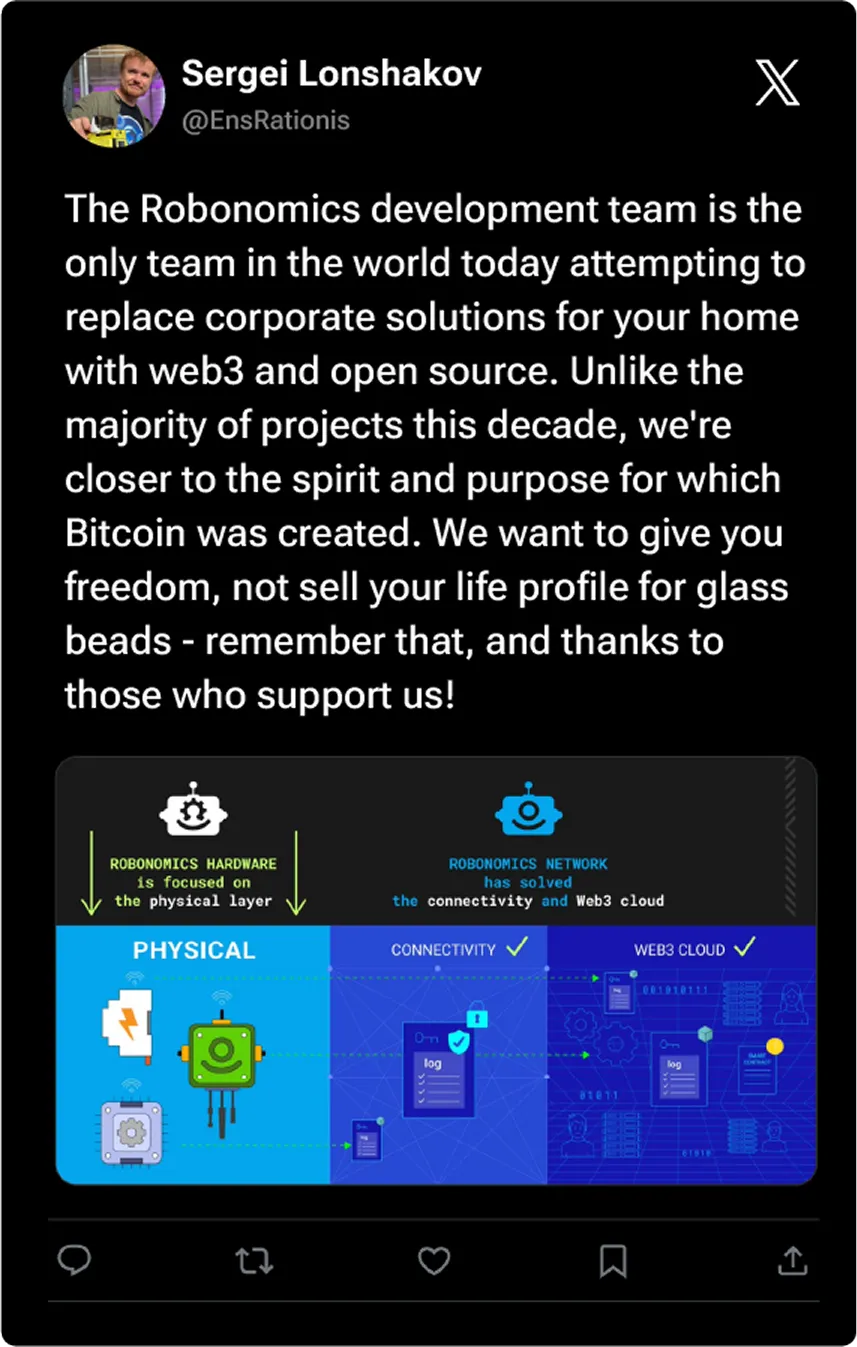
Open-Source IoT and Robotics ecosystem




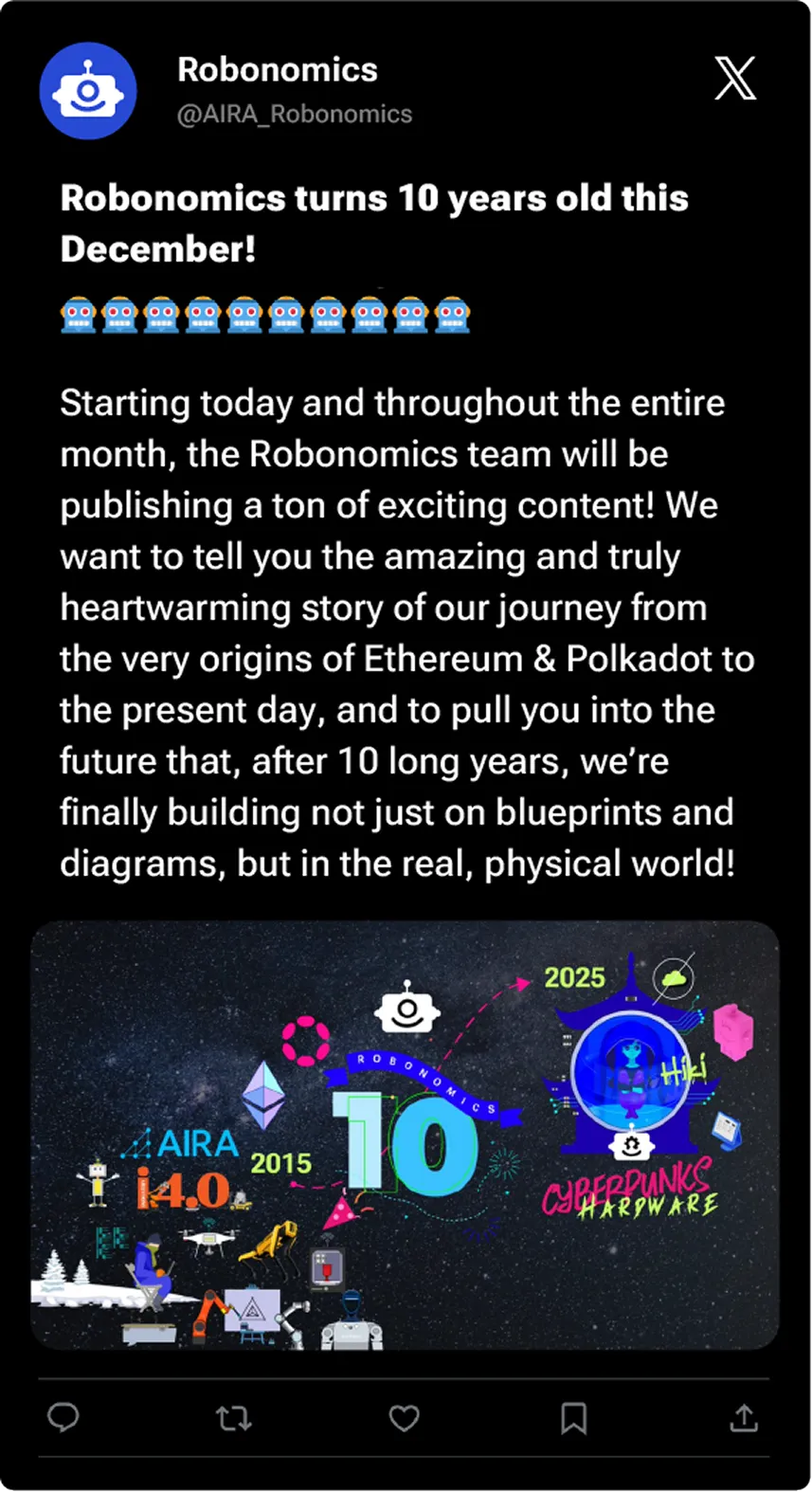
Robonomics is a team with more than 10 years of experience in robotics and on-chain infrastructure solutions. Over the years, we have worked on a wide range of R&D projects, published scientific papers, and built real-world tools and technologies.
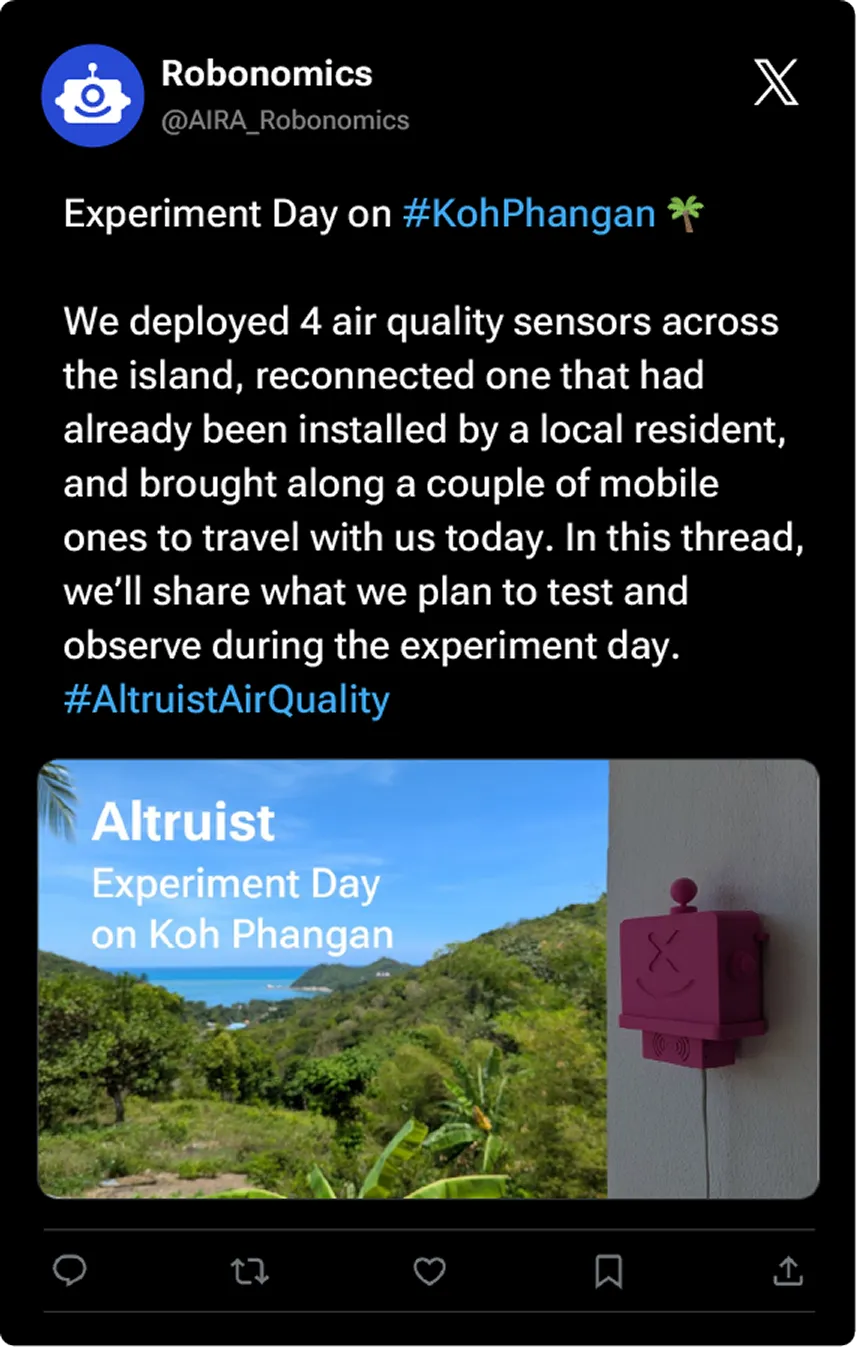
Today, we are bringing this experience into everyday life — creating practical, secure, and privacy-focused smart solutions and devices designed for real people and real environments. Explore what we are building and discover a new generation of safe and open smart technologies.

We Are Building an Open Ecosystem of the Future
Building and growing this kind of open-source ecosystem is our deep passion and mission. We'd be genuinely thrilled to see you join our community of users!

Comfort powered by open technologies
Since 2017, I have been actively involved in the project, applying and developing open-source smart home solutions based on Robonomics, making people’s lives in Cyprus more comfortable.


Cyberpunk is a choice in favor of privacy
Privacy today has become something like art. But it is a norm that everyone should have. Value your digital freedom and personal space.