Smart contracts
Ethereum
Bitcoin became the first money available to robots. Meanwhile we can't talk about Bitcoin in its current form as a tool for full-fledged technical and economic exchange.
Now we already have smart contracts, DeFi markets and a decentralized infrastructure for exchanging messages between robots that open up the possibility for humanity to create a fully automated part of the human economy - the robot economy.
One of the great opportunity to build the economy of robots is Ethereum technology. With Ethereum functionality robots are able not only exchange money, but to enter into contracts with humans and among themselves.
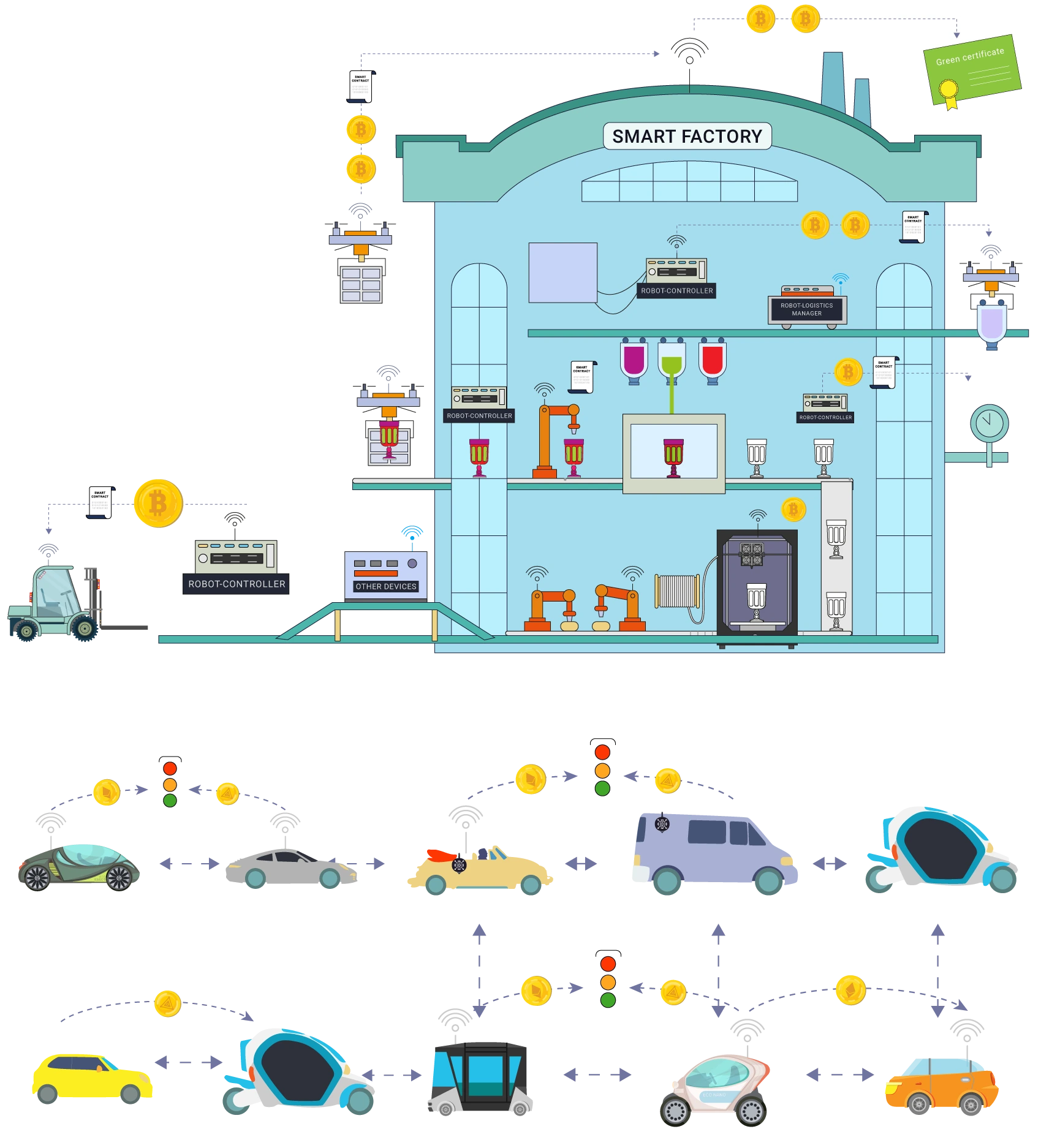
But what's the point of machine to machine (m2m) contract based communication? That's a great question! Let's go back to CPS. When we talk about direct communications between sensors, machine equipment or any other elements we still talk about collaboration within one regulated system. But if we want smart cities services to be alive (or even smart home in some cases), we need establish communication with various third-party elements.
Let's imagine drone delivery service. If a drone, for example, is DHL's property how it can access to Amazon's warehouses or access to over the entire airspace of the city? Is it be a monopoly? This is a major challenge for many 4th industrial revolution initiatives!
Most corporations say they need nearly complete rights to its surroundings because they don’t know how to securely set up the exchange of technical information between automated systems outside of their own internal corporate structure. At the same time, if you look at the processes where a person works, then we see that the cooperation of different corporations has been long and successfully existed. You can easily order door-to-door delivery of purchased goods on the Amazon website, and the courier will be able to drive a car along city roads, receive an order at the warehouse and bring it to you.
What's the difference? In the first case there is no way to build a contractual relationship between machines, and in the second case, in the world of people, contractual relations already exist.