The year 2021 ends and with it a 4-year cycle of studying the Polkadot technology and R&D work on the implementation of the Robonomics parachain.
The year 2021 ends and with it a 4-year cycle of studying the Polkadot technology and R&D work on the implementation of the Robonomics para chain. We want to devote the next year to the development of Robonomics as an already working infrastructure, focusing on the most viable Web3 application scenarios in the area of the Internet of Things. In this context, the key thing is that we have the relevant experience and a team willing to devote their time to research development and more.
Next, I will try to tell you about the products that we plan to release so as to provide Robonomics users with Web3 application scenarios for IoT, which are useful in everyday life.
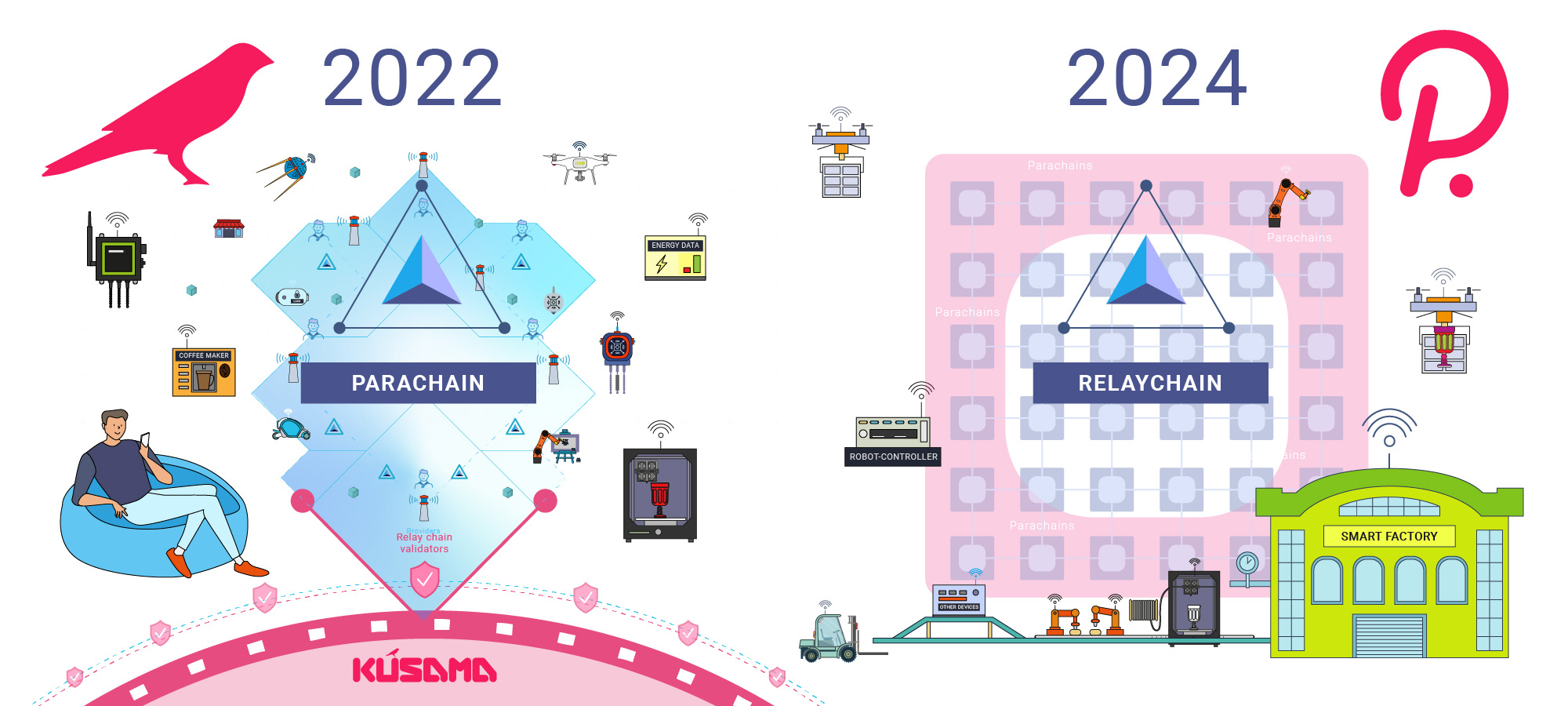
Kusama – a network for connecting personal IoT infrastructure and start-up projects; Polkadot – for corporate
This is how we imagine the development of Robonomics as a parachain. We want to start by implementing on the Kusama network, which features enough cybersecurity to service home robotics but is not suitable for big corporate accounts. In the context of B2B applications, Kusama is only suitable for start-up projects. And this would be so, at least until each release in Kusama is accompanied by an independent audit of the code and other components that are important for integration into the business processes of large companies.
Thus, users of Robonomics 2022 are the owners of home IoT infrastructure and start-up projects, which are interested in the possibilities of Web3, and they are ready to trust something new :)
Further information on our plans for this user category, next year.
RWS: Robonomics for your smart home
During 2020, a basic architecture was developed for representing the parachain as a familiar cloud for IoT devices. Moving forward, part of the future infrastructure of Robonomics in a parachain format, will be called RWS.
In 2021, numerous experiments were conducted to connect popular smart home solutions to RWS services. Developers are now ready to provide a monthly subscription service for those who already use a home IoT infrastructure and would like to try Web3-based services.
Some of the specific actions we have completed, to connect a smart home controlled by the Kusama network, are as follows:
- Completed the initial connection with Home Assistant, the most famous opensource solution in the field of smart home control, and will continue to develop this area to decouple the existing IoT hubs in homes from cloud services;
- Started the release and global distribution of the first IoT hub, which will be compatible with sensors operating under the Zigbee protocol in the spring of 2022;
- Continuation of the series of publications and instructions on how to organise space in a team without the tyranny of the administrator, but only with a light electric shock from Rosie’s home robot.
Besides providing control via the Kusama network, we want to allow everyone who cares about the word “dapp” to try Robonomics applications.
Robonomics-based applications for end users
Over 50 people have participated in R&D projects based on Robonomics over the past 5 years. As a result, we can see the emergence of teams specialising in specific applications, which are ready to offer users a product or service.
In fact, this evolution arises from the growth of the R&D team: from a team that exclusively publishes reports and instructions from specialists, into a whole ecosystem of teams that have specialized for specific scenarios while helping to write different pieces of the software platform. Today, the platform already has more than ten commonly used repositories for specific types of dapps, IoT connectivity, or building more complicated things. Below are some of them, or rather some of Robonomics’ applications that are now turning into separate start-up projects with the developers’ participation.
The Robodog is used not only for training but also for inspiration
The remote training programme for working with BD Spot is moving towards certification of specialists, with the issuance of diplomas of additional education in a university format and building corporate training programs, which, I think, will be implemented over the next year. This area is nonetheless extremely closed, like a school of magic in any fantasy universe. But the Robodog has another interesting feature: due to its popularity in society, Spot can be useful in simpler scenarios, for example, feeling like a robot operator from the future. During 2022, we want to create a separate opportunity to rent a Spot unit and a track. With that, we’ll open a portal to a world of inspiration for children who cannot play football or conduct other physical activity. After all, imagine how abruptly your view of what you can do will change after controlling a Robodog for an hour. We will attempt to launch such a programme together with a charitable foundation to help those children who are already struggling in a challenging developmental stage to pursue a future career in robotics.
Vegan techie
I rarely admit it but I have been a vegetarian for over 7 years – although I try to stay away from meetings with other vegetarians :) Perhaps this is specific to Russia, but looking at the interests of vegetarians, I notice with apprehension the tendencies towards a “back-to-the-middle-ages” lifestyle, i.e., natural resources grown by yourself, no waste – because you eat only vegetables… Needless to say, saving the Earth from our ignorance is necessary. And yet, I believe more in robots and their work as guards of the goddess Gaia than in any eco-trends.
To support those aiming to live in harmony with nature while adhering to the principle “it is a machine, not a person”, we are launching a project to automatically offset the carbon footprint of electricity anywhere in the world. Buy a smart socket for your home, connect to Robonomics, and install a bundle with the DAO IPCI application in the Robonomics marketplace. Thus, your smart home will autonomously consider the monthly power consumption and compensate for the environmental damage caused by the generation of this electricity by donating small cryptocurrency amount.
To realise this scenario, the company Evercity helped acquire the carbon credits of two verified projects, which are traded on a European exchange. There is one additional launch. This service will be launched in February-March 2022.
The first civilian sensor network in Russia using IPFS and Substrate Blockchain
For the third year in a row, the city of Tolyatti – incidentally where many project participants were born – has been experimenting with building urban monitoring using autonomous IoT sensors. In 2021, over 25 sensors throughout the city sent data to Robonomics, and a monitoring map was created in dapp format. Dozens of public ecologists have regularly worked with the map since the summer of 2021.
Find out more on the website of the non-profit organisation Airalab Rus, Tolyatti.
By the way, the touch map is globally available– feel free to connect as tens of those interested have already done. Here’s a sample video from the community:
Play
Feecc - quality control system for small factories
A student group from ITMO together with LLC “Multi-agent systems” created and tested a quality control system at two enterprises that can be easily integrated into an assembler’s workplace or into an element of a conveyor line. The system will be offered at a low price and features a high data protection level.
The Feecc hardware and software complex will be available for purchase in 2022 at https://multi-agent.io/
Merklebot’s product team is preparing to launch an integration with Chilean telescopes designed for deep-space photography. The telescope will be controlled with the help of the Robonomics’ dapp. Moreover, you will be able to take a picture of the sky and send a friend a “Hello from Alpha Centauri” NFT postcard!
Throughout the year the Robonomics custdev team conducted interviews with developers, professionals and experts from the fields of robotics, engineering, IoT and cloud technologies to get their point of view on Web3, distributed technologies and understand the problems they face when developing software applications and technical solutions. We also collected feedback about Robonomics, and in which use cases our platform could be useful in the opinion of the respondents. Below we would like to share our findings based on these interviews.
Statistics by respondents:
- Total interviews: 156 respondents
- Geography: European countries (36%), India (22%), USA (19%), other countries (23%)
- Areas of activity: ROS developers, robotics engineers, IoT engineers, startup founders, students and professors: Computer science, Robotics, Mechanical Engineering
In general, robotic and IoT software developers still vaguely understand the concept of Web3, or know about it, but do not use these technologies in their professional work. For some respondents, the idea of using blockchain and smart contracts to securely manage a network of devices was quite a surprise. Nevertheless, discussing the general problems of robotics, many developers have come to the same conclusions that we have come to: for the full-scale implementation of robotic devices in the future, the question of their reliable authentication will inevitably arise. Web3 technologies can be a possible solution, which, moreover, will make it possible to democratize and decentralize access to robots for all of humanity.
Overall, the responses highlight the idea that the manufacturing industry wants to change its old business model, but does not yet know how to do it painlessly. Several specialists from B2B industries in interviews noted that large companies, on the one hand, are worried about the reliability of IoT connectivity through conventional networks, but on the other hand, they are not yet ready for Web3 solutions as an alternative. The respondents were advised to demonstrate streamlined use cases that provide more profitable and less costly security than current, centralized solutions. A niche is open here for solutions like Robonomics, and according to one respondent, the motto “be robotically capable, but human readable” is a good approach to disseminate our ideas. The main obstacle was most often called the legal nuances of blockchains and cryptocurrencies, as well as the fact that we propose to preserve the confidentiality of data sent by user devices, which may contradict the business models of some companies.
Among the most frequent mentions in the stories of respondents was the problem of the high cost and complexity of deploying robotic solutions. Our common conclusion with the respondents was that the application of the concept of “robot-as-a-service” and smart leasing can make IoT and robots more accessible.
Among the use cases, for which, according to the respondents, the use of Robonomics is most attractive, scenarios with a public network (traffic management, environmental management), production / collection / storage of environmental data, IoT solutions for small businesses, creation of digital twins were named.
Next, we would like to introduce some of the noticeable respondents and their interesting stories.
Occupation: Robotics Software Developer (ROS); Experience: ROS, Azure.
During an interview with Kapil, it turned out that we came to the same ideas in different ways. While participating in Azure Hackathon, Kapil and his colleagues decided to develop a robot-as-a-service system for business based on blockchain and ROS — similar to Robonomics core elements at the beginning. Kapil believes that the cost of the robot’s work to the final product price can be accurately calculated using smart contracts that link economic and technical information. Both us and he were very amused to hear our common ideas, conveyed in other words, independently of each other. As a result of his acquaintance with Robonomics, Kapil decided to apply for our grant program and take courses at the Robonomics Academy.
Occupation: Software Developer; Experience: ROS with different robots — PAL Robotics TIAGo, KUKA youBot, MiR100, UR5, Jackal UGV, Turtlebot3, Parrot Bebop2.
The interview with Houman is a case where an engineer deeply immersed in robotics, mentioned in the article as a “robotics wizard”, became interested in the possibility of using Web3 for robots. After several interviews, Houman became so interested in our project that he has become a full-fledged Robonomics tutor. He is currently supervising our wiki with meaningful comments on its structure and reviewing the quality of guides and video tutorials.
Occupation: Software Developer for Architectural Design of IoT and Industrial Systems; Experience: R&D development for IoT.
Primož learned about Robonomics by reading our R&D book. He was amazed by the platform and in the interview provided insightful feedback on Robonomics. Concluded that in his opinion “there is a market for Robonomics for sure”. Then he pitched Robonomics as a solution to the projects he thought the platform would fit into.
Occupation: Java Developer; Experience: Electrical and Computer Engineering, Computer Science.
Prior to his role as a Java developer, Dawit worked on a humanoid robot project in which he and his colleagues attempted to integrate a controller into robots so that multiple robots could play soccer. For the data management of these robots, Dawit and his team were solely focused on interacting with live time data feeds as opposed to cloud data storage. Since most of the budget was spent on purchasing robots, Dawit had to take a much greater risk in conducting the experiment, because robots were the cheapest and a computer for processing live data was the simplest. Having learned about the smart leasing model that Robonomics allows to implement, Dawit became extremely interested in it.
Annex 2: Robonomics grant program: results of the year
In May 2021, Robonomics opened its own grant program to support students, young scientists and academic professionals in fields of cyber-physical systems, Industry 4.0 and IoT. The grant program has already successfully completed one round of proposals, and the second phase is now actively underway. On the eve of the new year, we would like to review the results of the outgoing one, talk about the success of old projects and the launch of new ones.
The stats for grant proposals are as follows:
- Forks of the grant repository — 12
- Submitted proposals — 6
- Approved proposals — 3
As we noted in the first round report, we began to select projects more carefully, giving preference to applicants from the research and academic community. Therefore, the latest proposals come from students and professors of European universities, and in many cases, an important result of the project would be the publication in high-quality scientific journals and presentations at scientific conferences.
Now let’s take a look at the status of already launched projects (detailed results are available in this repository), and then discuss new proposals.
Progress of launched projects
Since April 2021, the team of the very first approved project has been creating a simulation model of a smart factory with a digital twin, which is able to create almost complete copies of itself. For 9 months of active work, the participants conducted a voluminous study on the principles of building self-replicated automatic systems that would be quite simple to implement. As a result, the basis of the production cell is a workplace in the form of a honeycomb with a 6-DOF manipulator, to which a set of various tools and machines can be connected (from soldering and welding to CNC machine and 3D printer). For each element of the production system, a STEP model was created that can simulate the operation of these nodes.
The Robossembler team tried several frameworks for simulation and so far they use a bundle of ROS2 + Unity for multi-agent scenarios and ROS2 + Ignition Gazebo simulator for modeling small manipulation tasks. ROS2-tools PlanSys2 and MoveIt2 are used as a system for planning actions and interactions of many participating devices. The team continues to work on the architecture for integrating Robonomics and recently submitted an article to the IEEE Robotics and Automation Society journal about the concept of transferring skills and assembly programs between devices to launch new products.
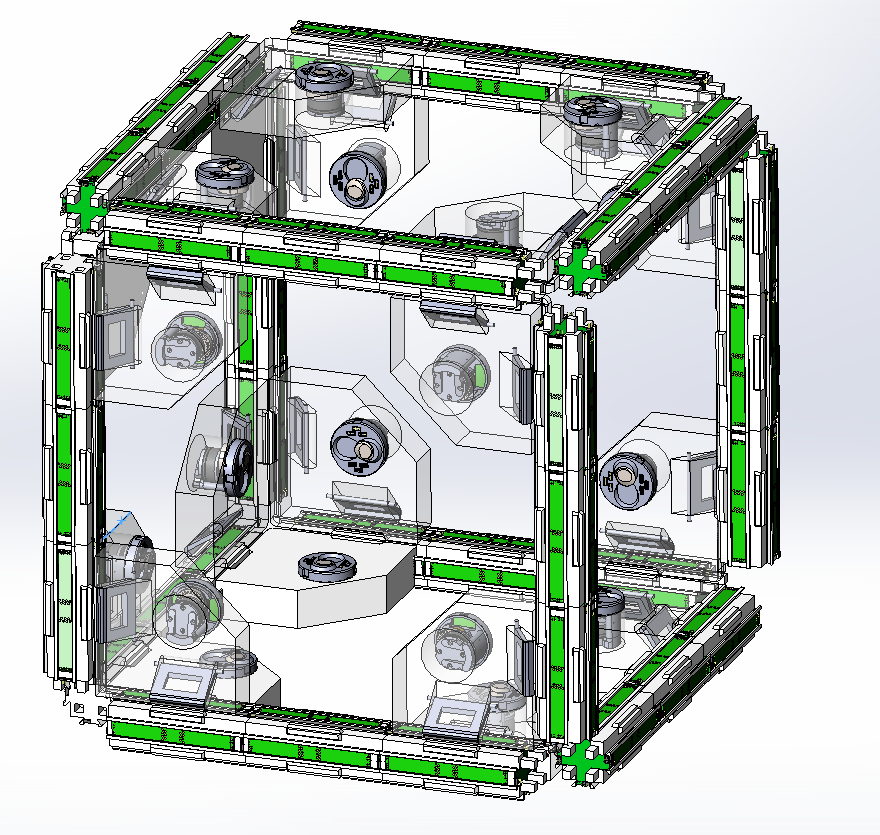
Modular workspace for scalability of the production system
The team publishes all the results and everyone can try to test some of the modules of the factory. It is noteworthy that the team develops all the elements based on realistic prototypes, and provides the real design documentation for them. Who knows, maybe the next step after the simulation is to build a real self-replicating factory…
A team from New Zealand is working to create a system that facilitates environmental regulation of the use of farm areas. For this purpose, the AgriDataTrade project organizes on farms a secure automated collection of various data on soil conditions (nitrates, phosphates, greenhouse gases, etc.), in order to then launch data tokenization. Ultimately, this will create a soil credit market similar to the carbon credit one.
The AgriDataTrade project was launched 4 months ago and during this period the team received the necessary sets of sensors (Hach sensors capable of measuring pH, nitrates, conductivity and other indicators) and agreed with several farms on their placement. To connect the sensors, an Arduino board is used, which, using the local mobile network via the MQTT protocol (see repository), connects to a remote server that creates nodes for these sensors in Robonomics Network. The team has already deployed a server at Victoria University of Wellington and will launch a test network of sensors on one of the farms in a few weeks.
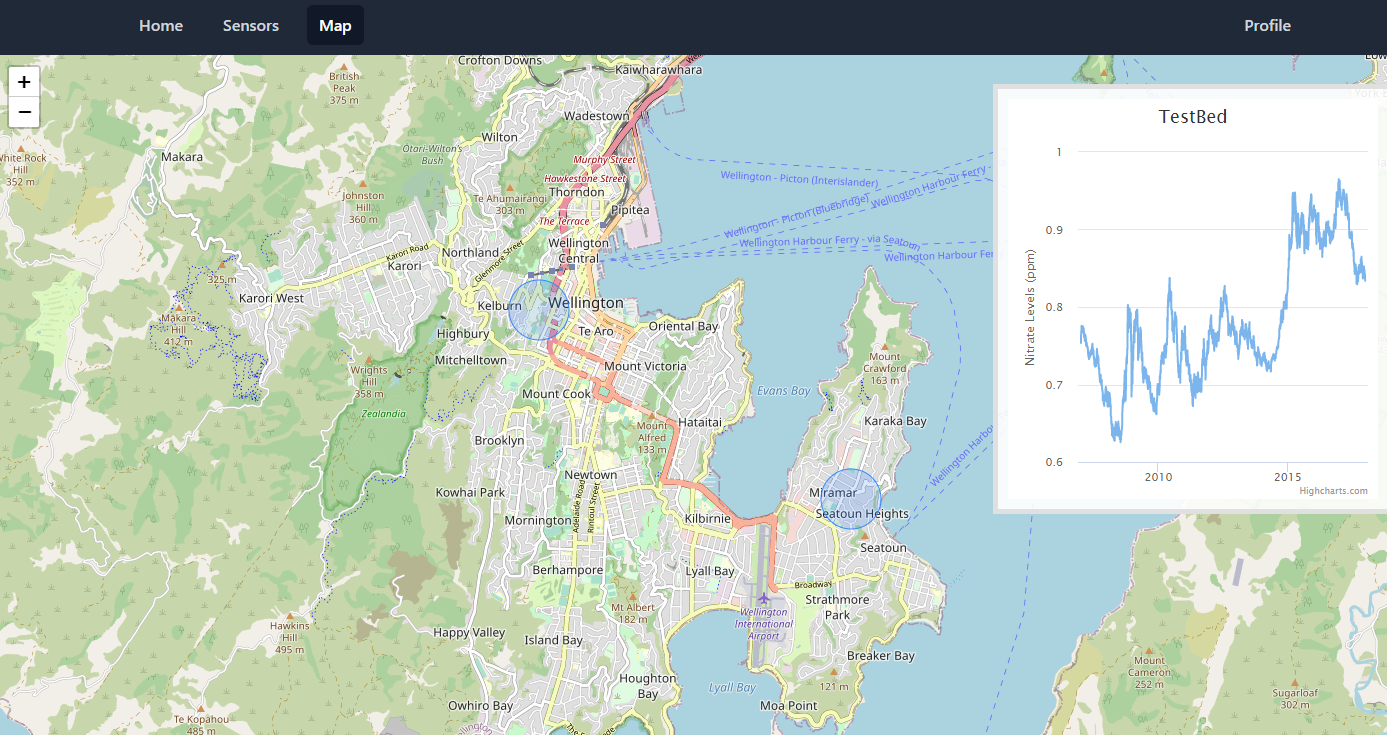
The test map on which the data from the sensors will be displayed
New projects
The latest project approved by the grant program is the Logistics Blockchain Digital Twin, proposed by a team of researchers from the University of Applied Sciences Upper Austria and Tallinn University of Technology. The project aims at identifying counterfeit products and verifying the authenticity of products in high-value supply chains. This is a serious problem both for the users of the products and for the manufacturers themselves (for example, in the heavy industry, automotive, aviation, pharmaceuticals), as it creates additional economic and legal burdens in the control of the chain.
The researchers propose a system based on digital twins of products using IoT sensors (for example, RFID tags) and the Robonomics Network, which would guarantee the observance of authenticity and the transfer of rights. To test the capabilities of such a system, applicants intend to create a realistic simulation of such a supply chain, which will be managed by a control system based on sensors and Robonomics.
Based on the results of the project, the authors are going to develop a specification for the use of blockchain systems and IoT in high-value supply chains and publish a number of articles on this topic.
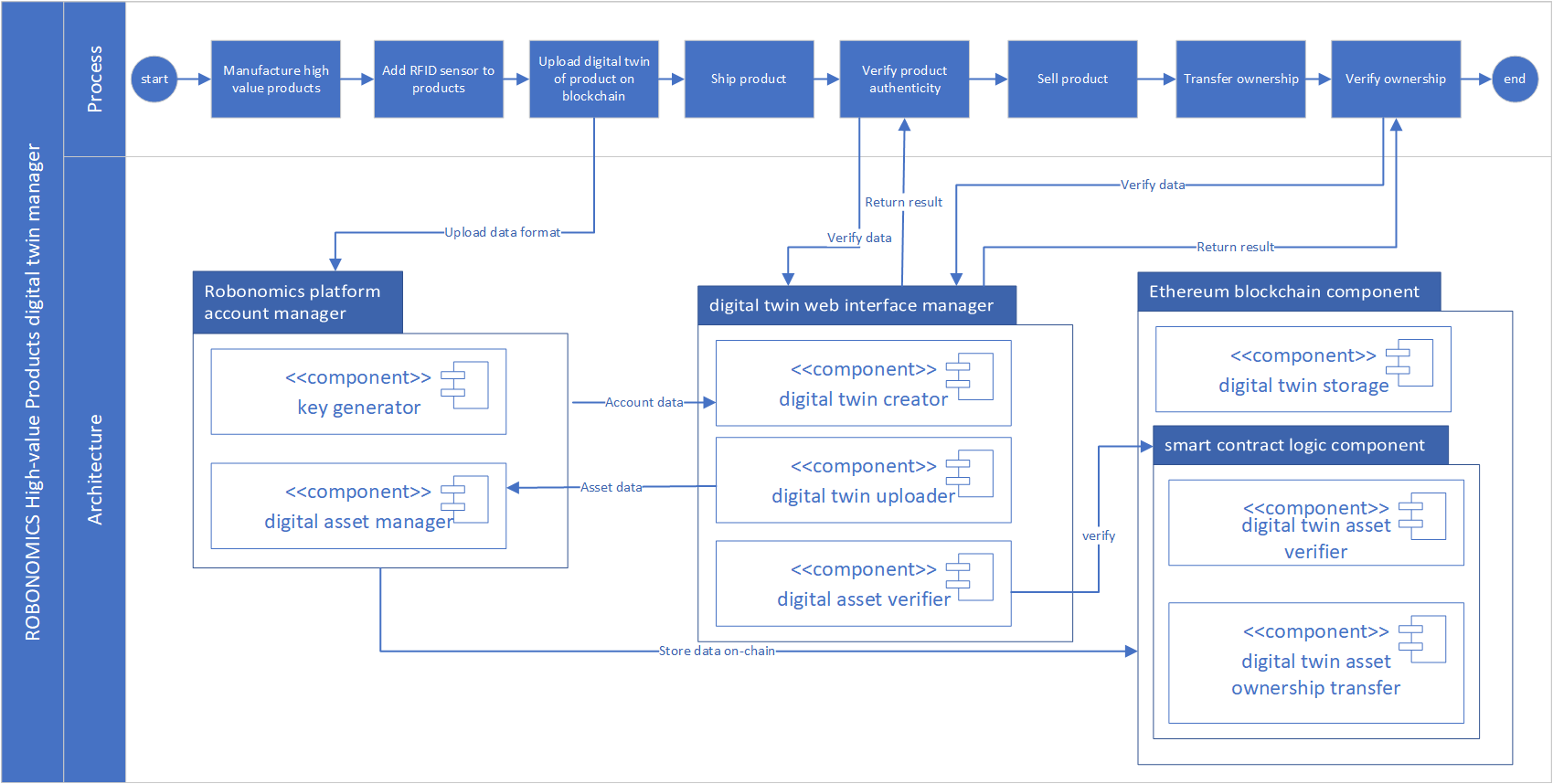
Authentication system architecture
This project is still undergoing approval at the Robonomics DAO, but we would like to present it now, since it touches on the topic of the previous one. Researchers from Hamburg University of Applied Sciences also aim at ensuring the authenticity and integrity of product data during the manufacturing process, for which they propose to create digital identities of objects by data blockchainzation of various sensors (researchers call this mechanism as sensorchain). The team similarly proposes to use RFID tags for this, and provide identification of devices by mapping with the location of these devices (proof-of-location). Robonomics is used to create and store digital twins of products and sensors.
But in the project, the authors want to go further and assemble a test bench based on the Fischertechnik constructor, which will simulate a factory and on which all developments will be tested. This makes the project very interesting, since, firstly, Robonomics has a similar factory built from such a constructor, and secondly, the development of the LogisticsBDT project can be quite simply synergized with this test bench to get additional results. So let’s wish the team good luck!
It has been a productive year for Robonomics-based R&D projects and we hope the next one will be even more eventful.
Stay tuned and follow updates
